Prinsip Dasar Elemen Kontrol Otomatis
Contoh kasus pada sebagian valve (katup) pada industry oil and gas, petrochemical, power plant dan semisalnya, dimana selain terdapat mode pengendalian open dan close yang bekerja hanya pada dua posisi on dan off, terdapat juga pengendalian lain yang dapat bekerja secara continue, yang artinya pengendalian valve bekerja dari titik 0 %, 25% sampai ke titik 100 %. Jenis pengendali ini lebih banyak dipakai di sistem pengendali proses, karena banyak proses operasi yang tidak dapat mentolerir fluktuasi process pada variable yang besar.
Terdapat tiga jenis pengendali kontinue, yaitu pengendali proporsional disingkat P, pengendali integral disingkat I, dan pengendali differensial disingkat D. Namun karena terdapat kelebihan dan kelemahan pada kendali tersebut maka seringkali dipakai bentuk kombinasi kendali, yaitu P + I disingkat PI, P + D disingkat PD, P + I + D disingkat PID, dan ketiga jenis pengendali ini memberikan respon yang berbeda – beda.
Pada dasarnya tugas suatu pengendali kontinue terbagi dalam dua tahap, yaitu membandingkan dan menghitung. Kedua tugas tersebut didalam diagram kotak diwakili oleh kerja summing function yang bertugas membandingkan measured variable dengan set point, sedangkan unit control bertugas menghitung besar kecilnya koreksi yang diperlukan.
Pembandingan itu sendiri dilakukan dengan mengurangi besaran set point dengan dengan besaran measurement variable, yang hasilnya adalah besaran yang disebut error. Karena set point bisa lebih kecil atau lebih besar dari measurement variable, sehingga nilai error dapat bernilai negatif dan positif. Berdasarkan besarnya error inilah unit control menghitung besarnya koreksi, sehingga error merupakan input unit control dan manipulated variable adalah output unit control.
Besarnya manipulated variable dihitung berdasarkan besarnya error dan transfer function unit control tergantung pada ” mode ” yang ada di controller ( control mode ) : P, I, PI, PD atau PID.
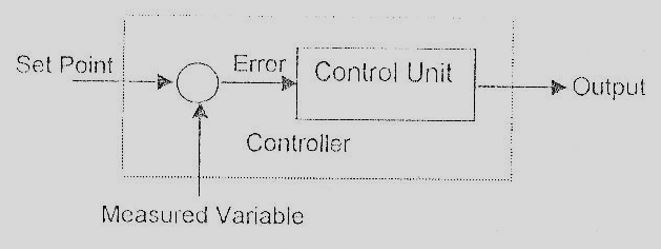 Gambar 1. Diagram Kendali
Gambar 1. Diagram Kendali
Dari gambar 1. menggambarkan bahwa besaran set point diproduksi oleh controller itu sendiri, yang mana besarnya dapat diatur dengan memutar knop set point yang ada pada controler. Controller menerima sinyal measurement variable di bagian yang secara umum ditulis ” input ”, dan menghasilkan sinyal manipulated variable dibagian ” output ”, sehingga dengan ketentuan itulah, sinyal yang menuju ke control valve harus selalu disambung ke ”output ”.
Karena engineer tidak akan dapat membedakan mode kendali unit dengan melihat controller dari luar, maka untuk mengetahui mode dari suatu unit controller, engineer harus membuka bagian dalam controller tersebut dan melihat mode apa saja yang ada pada unit tersebut (bentuk luar semua unit controller sama).
Khususnya jenis controller elektronik – digital, hampir seluruhnya mempunyai tiga buah mode : proportional, integral, dan derivative, dan tidak semua dari ketiga mode tersebut cocok dengan sebuah aplikasi, sehingga hanya mode yang dibutuhkan yang akan difungsikan pada system tersebut. Kemudian selanjutnya untuk memudahkan pembahasan, maka harus dibedakan kata unit control dengan kata pengendali atau controller.
Controller adalah seluruh bagian dari diagram kotak yang ada di gambar 1 termasuk set point, summing junction dan unit control. Sedangkan unit control hanya bagian dari controller yang secara langsung menghitung besarnya koreksi atas besarnya manipulated variable.
Seperti yang telah disebutkan diatas, terdapat tiga unsur unit control, yaitu proportional, integral dan derivative. Istilah proportional itu sendiri yang outputnya selalu sebanding (proporsional) dengan inputnya. Begitu pula, disebut integral karena output unit tersebut merupakan hasil integral dari inputnya, dan disebut derivative karena output unit tersebut merupakan hasil differensial atau derivative dari inputannya.




